Reference Card: Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Circle Scene)
Smooth Collision Avoidance For A First Order Multi Agent System - General Search-Friendly Guide
This lightweight reference arranges Smooth Collision Avoidance For A First Order Multi Agent System through important details, surrounding topics, common questions, and scan-friendly sections with enough variation for broader AGC-style topic coverage.
In addition, this page also connects Smooth Collision Avoidance For A First Order Multi Agent System with for broader topic coverage.
General Search-Friendly Guide
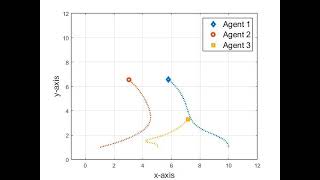
Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) This video illustrates five planar quadrotors (quadrotor confined to the 2D plane) avoiding a single static obstacle.
Guide Background
This part keeps Smooth Collision Avoidance For A First Order Multi Agent System connected to practical references instead of leaving it as a single isolated phrase.
Guide Review Notes
Before relying on any single result, compare related pages and verify important facts from stronger sources.
Topic Details to Compare
Important details can vary by source, so this page groups the most readable points into a scannable format.
Key points worth scanning
- Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Circle Scene)
- Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full)
- This video illustrates five planar quadrotors (quadrotor confined to the 2D plane) avoiding a single static obstacle.
Why this topic is useful
This page works best as one place for summaries, context, and nearby topics.
Helpful Questions
How should beginners approach Smooth Collision Avoidance For A First Order Multi Agent System?
Beginners should scan the overview first, then use related terms to narrow the subject into a more specific question.
What questions should readers ask about Smooth Collision Avoidance For A First Order Multi Agent System?
Check freshness, source quality, related examples, and any requirements or limitations before relying on one answer.
What should be checked first?
Readers should check the main context, important requirements, source freshness, and any details that may change over time.