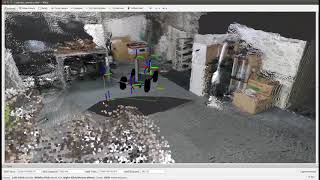
Practical Context: Some examples of resetting odometry when lost which shows the power of loop ...
Slam Using Point Cloud From D435i Rtab Map - Important References
This practical guide collects Slam Using Point Cloud From D435i Rtab Map through key notes, similar searches, practical details, and next-step resources without locking every page into the same repeated structure.
In addition, this page also connects Slam Using Point Cloud From D435i Rtab Map with for broader topic coverage.
Important References
The key details usually include definitions, examples, comparisons, requirements, limitations, and updated references.
Detailed Snapshot for Readers
A clean overview helps readers understand Slam Using Point Cloud From D435i Rtab Map before moving into details, examples, or connected topics.
Information Topic Background
This part keeps Slam Using Point Cloud From D435i Rtab Map connected to practical references instead of leaving it as a single isolated phrase.
Guide Reader Notes
Before relying on any single result, compare related pages and verify important facts from stronger sources.
Important details found
- Some examples of resetting odometry when lost which shows the power of loop ...
How readers can use this page
The value of this overview is a simple summary for Slam Using Point Cloud From D435i Rtab Map so they can continue with better search intent.
Common Questions
What details can change around Slam Using Point Cloud From D435i Rtab Map?
Dates, prices, policies, availability, providers, software versions, and public details may change over time.
What supporting details help explain Slam Using Point Cloud From D435i Rtab Map?
Comparison helps readers avoid narrow results and find the angle that best matches their intent.
How should readers use this page?
Use this page as a starting point, then open related entries or official sources when exact details matter.
What makes Slam Using Point Cloud From D435i Rtab Map easier to understand?
Clear headings, short explanations, practical notes, and related entries make Slam Using Point Cloud From D435i Rtab Map easier to scan and compare.