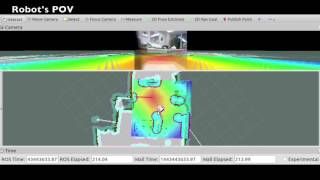
Reference Summary: RTABMAP or RTAB-Map (Real-Time Appearance-Based Mapping) is a RGB-D Graph-Based Simultaneous Location And Mapping, this is a technique used for creating a 2D or 3D map of an unknown environment
Slam Using Microsoft Kinect And Ros - General Reference Guide
Use this page to review Slam Using Microsoft Kinect And Ros with main details, supporting notes, and connected entries in a simple and scannable format.
In addition, this page also connects Slam Using Microsoft Kinect And Ros with for broader topic coverage.
General Reference Guide
RTABMAP or RTAB-Map (Real-Time Appearance-Based Mapping) is a RGB-D Graph-Based Simultaneous Location And Mapping, this is a technique used for creating a 2D or 3D map of an unknown environment
Reference Planning Tips
For changing topics, check updated sources and avoid depending on one short snippet alone.
Information Search Context
Context matters because Slam Using Microsoft Kinect And Ros can connect to nearby topics, related searches, and different reader intents.
Reference Key Requirements
Important details can vary by source, so this page groups the most readable points into a scannable format.
Key points worth scanning
- RTABMAP or RTAB-Map (Real-Time Appearance-Based Mapping) is a RGB-D Graph-Based
- Simultaneous Location And Mapping, this is a technique used for creating a 2D or 3D map of an unknown environment
Why this topic is useful
Readers can use this page to get a fast starting point without relying on one short snippet.
Helpful Questions
How can readers narrow down Slam Using Microsoft Kinect And Ros?
Readers can narrow it by adding location, year, product name, provider, price range, purpose, or the exact problem they want to solve.
How does Slam Using Microsoft Kinect And Ros connect to information?
Slam Using Microsoft Kinect And Ros can connect to information when readers need context, examples, comparisons, or practical next steps inside the same topic area.
What is the quickest way to understand Slam Using Microsoft Kinect And Ros?
Start with the main context, then compare related entries and check stronger sources when exact details matter.


![RGBD-SLAM with ROS and Microsoft Kinect [APO v1.0 Robot] Raspberry Pi](https://i.ytimg.com/vi/XDyhDrTW_5g/mqdefault.jpg)