Overview Notes: Proud of being one of the first humans to have the opportunity trying the The main control loop is implemented in C++ and runs on a Raspberry Pi 3B.
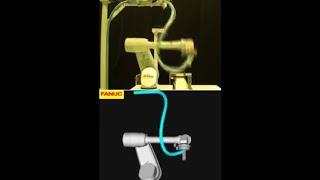
Simulate Robots With Flexible Cables 2 - Decision Context for Readers
This discovery page summarizes Simulate Robots With Flexible Cables 2 through topic clusters, supporting snippets, intent signals, and verification reminders without locking every page into the same repeated structure.
In addition, this page also connects Simulate Robots With Flexible Cables 2 with for broader topic coverage.
Decision Context for Readers
Proud of being one of the first humans to have the opportunity trying the The main control loop is implemented in C++ and runs on a Raspberry Pi 3B.
Information Main Considerations
The key details usually include definitions, examples, comparisons, requirements, limitations, and updated references.
Guide Reader Overview
A clean overview helps readers understand Simulate Robots With Flexible Cables 2 before moving into details, examples, or connected topics.
General Practical Checks
For changing topics, check updated sources and avoid depending on one short snippet alone.
Useful notes from the results
- The main control loop is implemented in C++ and runs on a Raspberry Pi 3B.
- Proud of being one of the first humans to have the opportunity trying the
What this page helps clarify
This topic hub helps readers find a broader view for Simulate Robots With Flexible Cables 2 when the topic has many possible meanings.
Quick FAQ
When should Simulate Robots With Flexible Cables 2 be verified from official sources?
Official or primary sources are best when the information can affect decisions, costs, eligibility, safety, or deadlines.
Why do search results for Simulate Robots With Flexible Cables 2 vary?
Start with the main context, then compare related entries and check stronger sources when exact details matter.
What does Simulate Robots With Flexible Cables 2 usually mean?
Simulate Robots With Flexible Cables 2 usually refers to a topic that needs context, related examples, and supporting references before readers make decisions or continue searching.
Why are related topics included?
Related topics help readers compare nearby references, explore similar searches, and avoid relying on one narrow result.