Useful Takeaway: This video introduces the concept of position vectors and orientation/ MIT 8.01 Classical Mechanics, Fall 2016 View the complete course: Instructor: Prof.
Rotation Matrix And Reference Frames Numerical Methods With Python 4 - Smart Summary for Readers
This reader-first page connects Rotation Matrix And Reference Frames Numerical Methods With Python 4 through key notes, similar searches, practical details, and next-step resources to support more niches without sounding like one fixed template.
In addition, this page also connects Rotation Matrix And Reference Frames Numerical Methods With Python 4 with for broader topic coverage.
Smart Summary for Readers
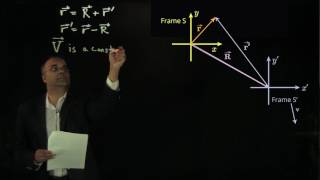
This video introduces the concept of position vectors and orientation/ MIT 8.01 Classical Mechanics, Fall 2016 View the complete course: Instructor: Prof.
General Search Background
This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ...
What to Check Next
Before relying on any single result, compare related pages and verify important facts from stronger sources.
General What to Review
Important details can vary by source, so this page groups the most readable points into a scannable format.
Key points worth scanning
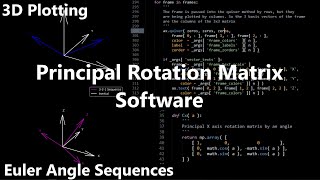
- This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ...
- This video introduces the concept of position vectors and orientation/
- MIT 8.01 Classical Mechanics, Fall 2016 View the complete course: Instructor: Prof.
What this page helps clarify
A structured page helps readers move from one place for summaries, context, and nearby topics.
Helpful Questions
What is the quickest way to understand Rotation Matrix And Reference Frames Numerical Methods With Python 4?
Start with the main context, then compare related entries and check stronger sources when exact details matter.
When should Rotation Matrix And Reference Frames Numerical Methods With Python 4 be verified from official sources?
Official or primary sources are best when the information can affect decisions, costs, eligibility, safety, or deadlines.
Why do search results for Rotation Matrix And Reference Frames Numerical Methods With Python 4 vary?
Start with the main context, then compare related entries and check stronger sources when exact details matter.