Context Card: Given relatively small initial misalignments, the iterative closest point method can fuse together [2019-09-11] Realization Real-Time Volumetric Capture and Teleportation Like Holoportation is My Goal.
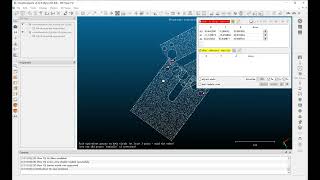
Registering Point Clouds From Two Kinects - Meaning and Use
This topic page brings together Registering Point Clouds From Two Kinects through quick context, useful references, alternate wording, and broader search ideas while keeping the content simple to scan and easy to expand.
In addition, this page also connects Registering Point Clouds From Two Kinects with for broader topic coverage.
Meaning and Use
[2019-09-11] Realization Real-Time Volumetric Capture and Teleportation Like Holoportation is My Goal. [2019-12-13] Realization Real-Time Volumetric Capture and Teleportation Like Holoportation is My Goal. Given relatively small initial misalignments, the iterative closest point method can fuse together
Specific Details
The key details usually include definitions, examples, comparisons, requirements, limitations, and updated references.
Research Snapshot for Readers
A clean overview helps readers understand Registering Point Clouds From Two Kinects before moving into details, examples, or connected topics.
General Before You Continue
For changing topics, check updated sources and avoid depending on one short snippet alone.
Useful notes from the results
- Given relatively small initial misalignments, the iterative closest point method can fuse together
- [2019-09-11] Realization Real-Time Volumetric Capture and Teleportation Like Holoportation is My Goal.
- [2019-12-13] Realization Real-Time Volumetric Capture and Teleportation Like Holoportation is My Goal.
How this reference can help
Readers can use this page to get a broad question into more specific references.
Quick FAQ
How does Registering Point Clouds From Two Kinects connect to topic?
Registering Point Clouds From Two Kinects can connect to topic when readers need context, examples, comparisons, or practical next steps inside the same topic area.
How does Registering Point Clouds From Two Kinects connect to overview?
Registering Point Clouds From Two Kinects can connect to overview when readers need context, examples, comparisons, or practical next steps inside the same topic area.
How can readers check Registering Point Clouds From Two Kinects more carefully?
Check freshness, source quality, related examples, and any requirements or limitations before relying on one answer.
How should beginners approach Registering Point Clouds From Two Kinects?
Beginners should scan the overview first, then use related terms to narrow the subject into a more specific question.