Reader Snapshot: Status: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2019 accepted * Category: Autonomous ... We study the nonlinear observability of a system's states in view of how well they are observable and what control inputs would ...
Online Optimal Perception Aware Trajectory Generation - General Common Mistakes
This reference brings together Online Optimal Perception Aware Trajectory Generation with main details, supporting notes, and connected entries so the subject feels less scattered.
In addition, this page also connects Online Optimal Perception Aware Trajectory Generation with for broader topic coverage.
General Common Mistakes
We study the nonlinear observability of a system's states in view of how well they are observable and what control inputs would ... This video is associated to the following paper : Kevin Desormeaux, Daniel Sidobre.
Reader Guide for Readers
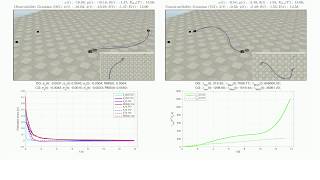
When user moves blue ball by mouse on screen, robot generates smooth and time Status: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2019 accepted * Category: Autonomous ... Abstract: Autonomous collision avoidance requires accurate environmental
Things to Know for Readers
This section highlights the practical pieces readers may want before opening a more specific related page.
General Common Reasons
Context matters because Online Optimal Perception Aware Trajectory Generation can connect to nearby topics, related searches, and different reader intents.
Main details to review
- This video is associated to the following paper : Kevin Desormeaux, Daniel Sidobre.
- We study the nonlinear observability of a system's states in view of how well they are observable and what control inputs would ...
- Status: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2019 accepted * Category: Autonomous ...
- When user moves blue ball by mouse on screen, robot generates smooth and time
What this page helps clarify
A structured page helps readers move from one place for summaries, context, and nearby topics.
Reader Questions
Why do people search for Online Optimal Perception Aware Trajectory Generation?
People often search for Online Optimal Perception Aware Trajectory Generation to understand the basics, compare related options, or find a clearer path to more specific information.
Is this page a final source?
No. It is best used as a quick reference and discovery page before checking stronger or official sources.
What is the safest way to use Online Optimal Perception Aware Trajectory Generation information?
Use it as general context first, then verify important points with official, primary, or more specific sources when accuracy matters.