Page Summary: Videos about engineering education, robotics education and diversifying STEM. Generalizing Mapless Navigation: Achieving Robust Obstacle Avoidance Using General Navigation Models
Obstacle Avoidance Using Potential Field In Mapless Navigation - Reference Topic Background
This discovery page summarizes Obstacle Avoidance Using Potential Field In Mapless Navigation with nearby references, reader questions, and supporting entries without losing the main context.
In addition, this page also connects Obstacle Avoidance Using Potential Field In Mapless Navigation with for broader topic coverage.
Reference Topic Background
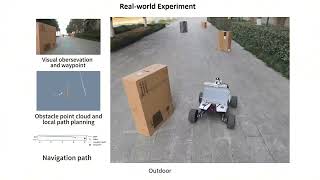
Videos about engineering education, robotics education and diversifying STEM. Generalizing Mapless Navigation: Achieving Robust Obstacle Avoidance Using General Navigation Models GitHub Repository: Project Description This project implements a ROS2-based ...
Reference Key Details
GitHub Repository: Project Description This project implements a ROS2-based ... The rover is attracted to a point in the upper right corner of the map.
Reference Snapshot
A clean overview helps readers understand Obstacle Avoidance Using Potential Field In Mapless Navigation before moving into details, examples, or connected topics.
Guide Verification Tips
For changing topics, check updated sources and avoid depending on one short snippet alone.
Useful notes from the results
- The rover is attracted to a point in the upper right corner of the map.
- GitHub Repository: Project Description This project implements a ROS2-based ...
- Videos about engineering education, robotics education and diversifying STEM.
- robotics It takes a significant amount of time and energy to create these free video ...
- Generalizing Mapless Navigation: Achieving Robust Obstacle Avoidance Using General Navigation Models
What this page helps clarify
This page works best as a broad question into more specific references.
Quick FAQ
Can details about Obstacle Avoidance Using Potential Field In Mapless Navigation change?
Yes. Some details may change depending on providers, policies, dates, locations, product updates, or official announcements.
How can this page help with research?
It groups related context and search paths so readers can move from a broad idea into more focused follow-up pages.
What related areas connect to Obstacle Avoidance Using Potential Field In Mapless Navigation?
Related areas may include comparisons, examples, requirements, common mistakes, updated references, and practical follow-up guides.
How does Obstacle Avoidance Using Potential Field In Mapless Navigation connect to guide?
Obstacle Avoidance Using Potential Field In Mapless Navigation can connect to guide when readers need context, examples, comparisons, or practical next steps inside the same topic area.