Helpful Context: This video is a recreation of the work presented here: ORB-SLAM2 is a real-time ... UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file".
Mono Slam Ros Implementation - Information Reference Overview
This guide collects Mono Slam Ros Implementation with important details, common questions, and next-step references so the subject feels less scattered.
In addition, this page also connects Mono Slam Ros Implementation with for broader topic coverage.
Information Reference Overview
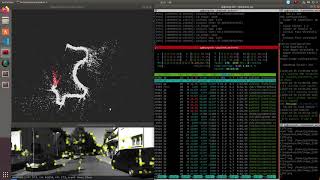
This work describes an open source software package in the Robot Operating System ( The rgb image stream is fed to packnet-sfm to infer the depth image (Online inference).
Topic Topic Background
UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". This video is a recreation of the work presented here: ORB-SLAM2 is a real-time ... Get FREE Robotics & AI Resources (Guide, Textbooks, Courses, Resume Template, Code & Discounts) – Sign up via the pop-up ...
Reference Reader Notes
Get FREE Robotics & AI Resources (Guide, Textbooks, Courses, Resume Template, Code & Discounts) – Sign up via the pop-up ... The free space of the occupancy map is drawn using the Bresenham's line algorithm, ...
Guide Specific Notes
Important details can vary by source, so this page groups the most readable points into a scannable format.
Key points worth scanning
- This video is a recreation of the work presented here: ORB-SLAM2 is a real-time ...
- The free space of the occupancy map is drawn using the Bresenham's line algorithm, ...
- This work describes an open source software package in the Robot Operating System (
- Get FREE Robotics & AI Resources (Guide, Textbooks, Courses, Resume Template, Code & Discounts) – Sign up via the pop-up ...
- The rgb image stream is fed to packnet-sfm to infer the depth image (Online inference).
Why this overview helps
A structured page helps by giving readers a less scattered reference for Mono Slam Ros Implementation while keeping the topic easy to scan.
Helpful Questions
Why do search results for Mono Slam Ros Implementation vary?
Start with the main context, then compare related entries and check stronger sources when exact details matter.
What does Mono Slam Ros Implementation usually mean?
Mono Slam Ros Implementation usually refers to a topic that needs context, related examples, and supporting references before readers make decisions or continue searching.
Why are related topics included?
Related topics help readers compare nearby references, explore similar searches, and avoid relying on one narrow result.