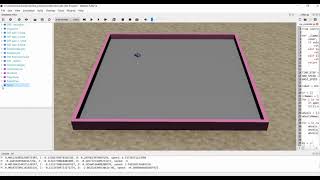
Context Card: Participants will learn to command digital agents and generative engines. Robot getting to the goal around the maze using the Bug Zero Algorithm where it can only turn right.
Lab 2 Task 1 Webots Motion With Pid - Core Overview
This browsing page gathers Lab 2 Task 1 Webots Motion With Pid with search intent clues, practical reminders, and quick takeaways so readers can scan the subject faster.
In addition, this page also connects Lab 2 Task 1 Webots Motion With Pid with for broader topic coverage.
Core Overview
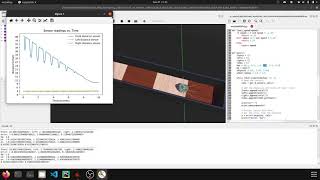
Robot getting to the goal around the maze using the Bug Zero Algorithm where it can only turn right. Participants will learn to command digital agents and generative engines. This robot used position sensors to find the difference from its current readings and previous reading to determine the linear ...
What to Confirm
This robot used position sensors to find the difference from its current readings and previous reading to determine the linear ...
Context Supporting Context
Context matters because Lab 2 Task 1 Webots Motion With Pid can connect to nearby topics, related searches, and different reader intents.
Overview Quick Tips
Use the related entries as follow-up paths when you need more examples, current details, or alternative wording.
Relevant points collected here
- Robot getting to the goal around the maze using the Bug Zero Algorithm where it can only turn right.
- Participants will learn to command digital agents and generative engines.
- This robot used position sensors to find the difference from its current readings and previous reading to determine the linear ...
Why this overview helps
A structured page helps readers move from a broad question into more specific references.
Questions People Also Check
Can details about Lab 2 Task 1 Webots Motion With Pid change?
Yes. Some details may change depending on providers, policies, dates, locations, product updates, or official announcements.
How can this page help with research?
It groups related context and search paths so readers can move from a broad idea into more focused follow-up pages.
What related areas connect to Lab 2 Task 1 Webots Motion With Pid?
Related areas may include comparisons, examples, requirements, common mistakes, updated references, and practical follow-up guides.
How does Lab 2 Task 1 Webots Motion With Pid connect to guide?
Lab 2 Task 1 Webots Motion With Pid can connect to guide when readers need context, examples, comparisons, or practical next steps inside the same topic area.