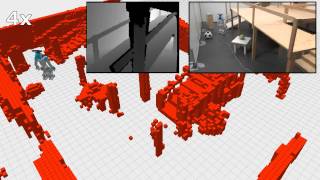
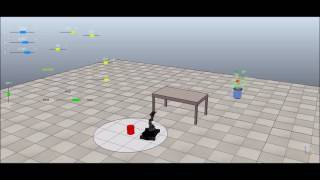
At a Glance: Department of Electrical Engineering University of Moratuwa Sri Lanka. This is one of my master thesis videos in which the robot Dora uses the
Field Based Navigation For A 3d Obstacle Avoidance Using Kinect - Reference Questions to Ask
This lightweight reference arranges Field Based Navigation For A 3d Obstacle Avoidance Using Kinect through topic clusters, supporting snippets, intent signals, and verification reminders with enough variation for broader AGC-style topic coverage.
In addition, this page also connects Field Based Navigation For A 3d Obstacle Avoidance Using Kinect with for broader topic coverage.
Reference Questions to Ask
Department of Electrical Engineering University of Moratuwa Sri Lanka. This is one of my master thesis videos in which the robot Dora uses the
Context Main Overview
HMC Robotics Core Lab (2/05/2014) - Morgan Mastrovich and Sherman Lam This robot uses proportional control and vision data ... TURTLE BOT OBSTACLE AVOIDANCE USING DATA FROM KINECT - Point cloud to Laser Scan Conversion Undergraduate Student Project Department of Electrical Engineering University of Moratuwa Sri Lanka.
Context Important Notes
This section highlights the practical pieces readers may want before opening a more specific related page.
Guide Comparison Context
Context matters because Field Based Navigation For A 3d Obstacle Avoidance Using Kinect can connect to nearby topics, related searches, and different reader intents.
Main details to review
- Department of Electrical Engineering University of Moratuwa Sri Lanka.
- HMC Robotics Core Lab (2/05/2014) - Morgan Mastrovich and Sherman Lam This robot uses proportional control and vision data ...
- TURTLE BOT OBSTACLE AVOIDANCE USING DATA FROM KINECT - Point cloud to Laser Scan Conversion
- Undergraduate Student Project Department of Electrical Engineering University of Moratuwa Sri Lanka.
How this reference can help
Readers often search for Field Based Navigation For A 3d Obstacle Avoidance Using Kinect because they want a lightweight hub for scanning and continuing research.
Reader Questions
What should be avoided when researching Field Based Navigation For A 3d Obstacle Avoidance Using Kinect?
Avoid treating one short snippet as complete, especially when the topic involves money, health, law, schedules, or current details.
What is the best next step after reading about Field Based Navigation For A 3d Obstacle Avoidance Using Kinect?
The best next step is to open related entries, compare several references, and verify any important detail before acting.
How does Field Based Navigation For A 3d Obstacle Avoidance Using Kinect connect to similar topics?
Avoid treating one short snippet as complete, especially when the topic involves money, health, law, schedules, or current details.