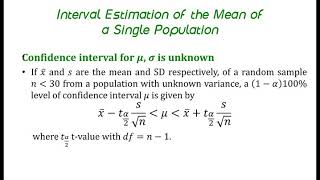
Fast Overview: Probability and Statistics Class Chapter 4 Lesson 3: Confidence Intervals for the Population Mean when σ is Unknown Lesson 4: ... MIT 6.041SC Probabilistic Systems Analysis and Applied Probability, Fall 2013 View the complete course: ...
Estimation Of Parameter Part 2 - Overview Reference Guide
This search guide collects Estimation Of Parameter Part 2 with follow-up ideas, topic signals, and clear context with a cleaner path to related topics.
In addition, this page also connects Estimation Of Parameter Part 2 with for broader topic coverage.
Overview Reference Guide
Probability and Statistics Class Chapter 4 Lesson 3: Confidence Intervals for the Population Mean when σ is Unknown Lesson 4: ... MIT 6.041SC Probabilistic Systems Analysis and Applied Probability, Fall 2013 View the complete course: ...
Practical Checks for Readers
For changing topics, check updated sources and avoid depending on one short snippet alone.
Freshness Notes
Context matters because Estimation Of Parameter Part 2 can connect to nearby topics, related searches, and different reader intents.
Main Notes for Readers
Important details can vary by source, so this page groups the most readable points into a scannable format.
Key points worth scanning
- Probability and Statistics Class Chapter 4 Lesson 3: Confidence Intervals for the Population Mean when σ is Unknown Lesson 4: ...
- MIT 6.041SC Probabilistic Systems Analysis and Applied Probability, Fall 2013 View the complete course: ...
How readers can use this page
This page is useful when readers need clear context before opening more detailed pages.
Helpful Questions
What makes Estimation Of Parameter Part 2 worth comparing?
Comparison helps readers avoid narrow results and find the angle that best matches their intent.
What details can change around Estimation Of Parameter Part 2?
Dates, prices, policies, availability, providers, software versions, and public details may change over time.
What supporting details help explain Estimation Of Parameter Part 2?
Comparison helps readers avoid narrow results and find the angle that best matches their intent.