Fast Reader Notes: ACC Federated models Clash detection Stanford Civil Engineering CEE 120B/220B - Jan 17th ... Point cloud registration is a foundational task for 3D alignment and reconstruction applications.
Eccv 2024 Sslbig Tutorial Mohammadreza - Resource Details to Compare
Use this page to review Eccv 2024 Sslbig Tutorial Mohammadreza with helpful explanations, comparison points, and reader-focused details without jumping between unrelated pages.
In addition, this page also connects Eccv 2024 Sslbig Tutorial Mohammadreza with for broader topic coverage.
Resource Details to Compare
ACC Federated models Clash detection Stanford Civil Engineering CEE 120B/220B - Jan 17th ... Point cloud registration is a foundational task for 3D alignment and reconstruction applications. RAPiD-Seg: Range-Aware Pointwise Distance Distribution Networks for 3D LiDAR Segmentation More information: ...
Context What It Connects To
RAPiD-Seg: Range-Aware Pointwise Distance Distribution Networks for 3D LiDAR Segmentation More information: ... Simulated virtual environments have been widely used to learn robotic agents that perform daily household tasks.
Reader Guide for Readers
Emin describes their recent efforts to understand what modern self-supervised learning algorithms can learn from a realistic proxy ... This is the official presentation video of the paper "Self-Adapting Large Visual-Language Models to Edge Devices across Visual ... DoubleTake: Geometry Guided Depth Estimation Mohamed Sayed, Filippo Aleotti, Jamie Watson, Zawar Qureshi, Guillermo ...
Overview Useful Reminders
Use the related entries as follow-up paths when you need more examples, current details, or alternative wording.
Relevant points collected here
- Emin describes their recent efforts to understand what modern self-supervised learning algorithms can learn from a realistic proxy ...
- Simulated virtual environments have been widely used to learn robotic agents that perform daily household tasks.
- RAPiD-Seg: Range-Aware Pointwise Distance Distribution Networks for 3D LiDAR Segmentation More information: ...
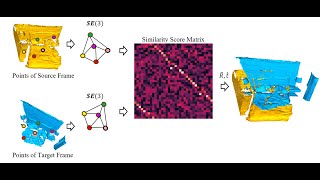
- Point cloud registration is a foundational task for 3D alignment and reconstruction applications.
- DoubleTake: Geometry Guided Depth Estimation Mohamed Sayed, Filippo Aleotti, Jamie Watson, Zawar Qureshi, Guillermo ...
What this page helps clarify
This page is useful when readers need a simple way to compare connected search results.
Questions People Also Check
Is this page a final source?
No. It is best used as a quick reference and discovery page before checking stronger or official sources.
What is the safest way to use Eccv 2024 Sslbig Tutorial Mohammadreza information?
Use it as general context first, then verify important points with official, primary, or more specific sources when accuracy matters.
How does Eccv 2024 Sslbig Tutorial Mohammadreza connect to topic?
Eccv 2024 Sslbig Tutorial Mohammadreza can connect to topic when readers need context, examples, comparisons, or practical next steps inside the same topic area.
How does Eccv 2024 Sslbig Tutorial Mohammadreza connect to overview?
Eccv 2024 Sslbig Tutorial Mohammadreza can connect to overview when readers need context, examples, comparisons, or practical next steps inside the same topic area.


![ECCV 2024 Paper: Unsqueeze [cls] Bottleneck to Learn Rich Representations](https://i.ytimg.com/vi/FRddip60a7k/mqdefault.jpg)

![[ECCV 2024] DoubleTake: Geometry Guided Depth Estimation](https://i.ytimg.com/vi/IklQ5AHNdI8/mqdefault.jpg)

![[ECCV 2024] Self-Adapting Large Visual-Language Models to Edge Devices across Visual Modalities](https://i.ytimg.com/vi/peOZG38X1x0/mqdefault.jpg)


