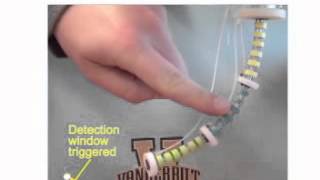
Research Brief: This video shows the work done on adapting the momentum observer method for
Dynamic Collision Detection For Continuum Robots - Guide Summary
Use this page to review Dynamic Collision Detection For Continuum Robots with helpful explanations, comparison points, and reader-focused details before opening more specific references.
In addition, this page also connects Dynamic Collision Detection For Continuum Robots with for broader topic coverage.
Guide Summary
This section introduces Dynamic Collision Detection For Continuum Robots with the most useful background points and a simple path into the rest of the page.
Context Useful Details
The key details usually include definitions, examples, comparisons, requirements, limitations, and updated references.
Follow-Up Ideas for Readers
Use the related entries as follow-up paths when you need more examples, current details, or alternative wording.
Practical Meaning
This part keeps Dynamic Collision Detection For Continuum Robots connected to practical references instead of leaving it as a single isolated phrase.
Quick reference points
- This video shows the work done on adapting the momentum observer method for
What this page helps clarify
The format helps reduce scattered browsing by giving a fast starting point without relying on one short snippet.
Useful FAQ
What supporting details help explain Dynamic Collision Detection For Continuum Robots?
Comparison helps readers avoid narrow results and find the angle that best matches their intent.
How should readers use this page?
Use this page as a starting point, then open related entries or official sources when exact details matter.
What makes Dynamic Collision Detection For Continuum Robots easier to understand?
Clear headings, short explanations, practical notes, and related entries make Dynamic Collision Detection For Continuum Robots easier to scan and compare.