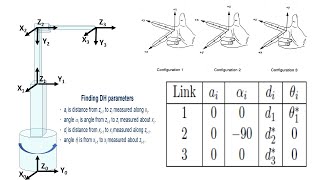
Essential Summary: This video is a tutorial that covers the forward and inverse kinematic calculations for a 6 axis robot arm. This video explains the D-H modeling of the cylindrical robot to find the transformation matrix.
Denavit Hartenberg Reference Frame Layout - General Core Points
This reader-first page connects Denavit Hartenberg Reference Frame Layout through quick context, useful references, alternate wording, and broader search ideas without locking every page into the same repeated structure.
In addition, this page also connects Denavit Hartenberg Reference Frame Layout with for broader topic coverage.
General Core Points
This video explains the D-H modeling of the cylindrical robot to find the transformation matrix. And s is a value of zero in this case because there is no distance along along z2 to get to the next coordinate This video is a tutorial that covers the forward and inverse kinematic calculations for a 6 axis robot arm.
General Context Guide
This part keeps Denavit Hartenberg Reference Frame Layout connected to practical references instead of leaving it as a single isolated phrase.
Topic Search Overview
Denavit Hartenberg Reference Frame Layout can be reviewed through a clear overview first, then compared with related entries and supporting context.
Follow-Up Ideas
Use the related entries as follow-up paths when you need more examples, current details, or alternative wording.
Relevant points collected here
- This video explains the D-H modeling of the cylindrical robot to find the transformation matrix.
- And s is a value of zero in this case because there is no distance along along z2 to get to the next coordinate
- This video is a tutorial that covers the forward and inverse kinematic calculations for a 6 axis robot arm.
Why this topic is useful
This reference can help when someone wants a simple way to compare connected search results.
Questions People Also Check
What details can change around Denavit Hartenberg Reference Frame Layout?
Dates, prices, policies, availability, providers, software versions, and public details may change over time.
What supporting details help explain Denavit Hartenberg Reference Frame Layout?
Comparison helps readers avoid narrow results and find the angle that best matches their intent.
How should readers use this page?
Use this page as a starting point, then open related entries or official sources when exact details matter.
What makes Denavit Hartenberg Reference Frame Layout easier to understand?
Clear headings, short explanations, practical notes, and related entries make Denavit Hartenberg Reference Frame Layout easier to scan and compare.