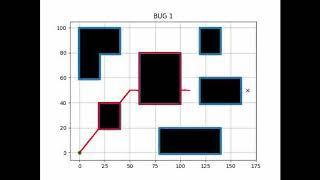
Topic Notes: The shown robot (SparkFun Redbot) is shown to avoid obstacles and reach the goal using the different bug algorithms.
Bug2 Alg1 Implementation - Reference Questions to Ask
This guide collects Bug2 Alg1 Implementation with helpful explanations, comparison points, and reader-focused details so the subject feels less scattered.
In addition, this page also connects Bug2 Alg1 Implementation with for broader topic coverage.
Reference Questions to Ask
Before relying on any single result, compare related pages and verify important facts from stronger sources.
Context Guide
A clean overview helps readers understand Bug2 Alg1 Implementation before moving into details, examples, or connected topics.
Overview Practical Details
This section highlights the practical pieces readers may want before opening a more specific related page.
Guide Comparison Context
Context matters because Bug2 Alg1 Implementation can connect to nearby topics, related searches, and different reader intents.
Main details to review
- The shown robot (SparkFun Redbot) is shown to avoid obstacles and reach the goal using the different bug algorithms.
How this reference can help
The format helps reduce scattered browsing by giving one place for summaries, context, and nearby topics.
Reader Questions
What should be avoided when researching Bug2 Alg1 Implementation?
Avoid treating one short snippet as complete, especially when the topic involves money, health, law, schedules, or current details.
What is the best next step after reading about Bug2 Alg1 Implementation?
The best next step is to open related entries, compare several references, and verify any important detail before acting.
How does Bug2 Alg1 Implementation connect to similar topics?
Avoid treating one short snippet as complete, especially when the topic involves money, health, law, schedules, or current details.